Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
Data-Driven Dynamics and Control
Dynamic Mode Decomposition
Flow Control
Gaussian Processes
Motion Prediction
This is a page not in th emain menu
Stochastic Optimal Control
Transformers
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Short description of portfolio item number 1
Short description of portfolio item number 2
Presented at the AIAA Scitech 2020 Forum.
Coherent structures in wall-bounded flows, such as large-scale motions (LSMs), contribute significantly to the dynamics of turbulent boundary layers: they contain a large fraction of the turbulent kinetic energy, add to the average Reynolds shear stresses, and transport momentum. Therefore, one may wish to control turbulence by manipulating the movement of these LSMs in order to achieve a desired performance gain (such as drag reduction, noise reduction, or mixing enhancement). In the present work, we approach the above problem in an abstract way by developing a model-based approach of steering towards the wall isolated volumes of interest (that could be an LSM we wish to control) in a direct numerical simulation (DNS) of a three-dimensional laminar boundary layer using as an actuator a Gaussian-distributed force field applied in a region of the flow directly above the wall. In particular, we derive a reduced-order linear model of the actuator dynamics using a variant of dynamic mode decomposition that includes control inputs (dynamic mode decomposition with control - DMDc), which describes how the actuator input (i.e. the magnitude of the input force field) perturbs the velocity field (i.e. the output of the reduced-order model) downstream of the actuator. The identified linear model is then required to track a reference output that creates a downwash along the trajectory of the target volume. To that end, the control design is formulated as an output tracking linear-quadratic optimal control problem with input constraints in discrete time, which is reduced to an equivalent quadratic program with linear constraints. The solution to the constrained optimization problem yields an input signal that effectively drives the target volume towards the wall while minimizing the actuation energy.
Published in Engineering Optimization, 2020.
For aerodynamic and conjugate heat transfer problems, the work reported in this article investigated the effect of the grid displacement model on the derivatives of an objective function with respect to the design variables. A comparison was made in the first step of the study between reference sensitivity derivatives computed by finite differences and different grid displacement models (volumetric B-splines, Laplace partial differential equations, Delaunay graphs and inverse distance weighting). Then, a continuous adjoint method including the adjoint to the Laplace grid displacement model was used to recompute sensitivity derivatives. To shed more light and to support the authors’ findings, an alternative continuous adjoint method for computing the objective function gradient in terms of the field integrals of grid sensitivities was also formulated and programmed. Finally, the effect of an inconsistent differentiation of the grid displacement model on the optimized solution was investigated. The choice of the grid displacement model did not affect the sensitivity derivatives in any of the cases examined.
Presented at the 2020 American Control Conference.
| Covariance Over Time | Sampled Trajectories |
|---|---|
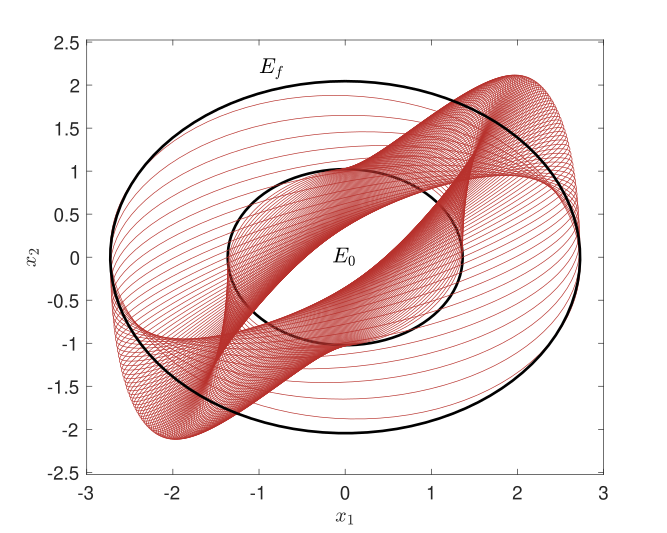 | 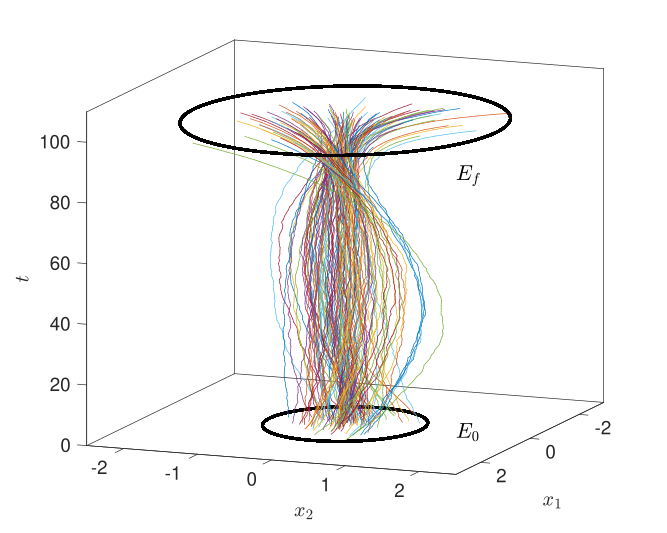 |
Published in the IEEE Control Systems Letters, 2021.
Published in the AIAA Journal, 2021.
In collaboration with A. Saravanos and E. Theodorou at Georgia Tech. Presented at Robotics - Science and Systems 2021.
In this paper, we address the problem of steering a team of agents under stochastic linear dynamics to prescribed final state means and covariances. The agents operate in a common environment where inter-agent constraints may also be present. In order for our method to be scalable to large- scale systems and computationally efficient, we approach the problem in a distributed control framework using the Alter- nating Direction Method of Multipliers (ADMM). Each agent solves its own covariance steering problem in parallel, while additional copy variables for its closest neighbors are introduced to ensure that the inter-agent constraints will be satisfied. The inclusion of these additional variables creates a requirement for consensus between original and copy variables that involve the same agent. For this reason, we employ a variation of ADMM for consensus optimization. Simulation results on multi-vehicle systems under uncertainty with collision avoidance constraints illustrate the effectiveness of our algorithm. The substantially improved scalability of our distributed approach with respect to the number of agents is also demonstrated, in comparison with an equivalent centralized scheme.
Presented at the inaugural Modeling, Estimation, and Control Conference 2021 in Austin, TX.
| Learned (Cautious) Model | Exact Model |
|---|---|
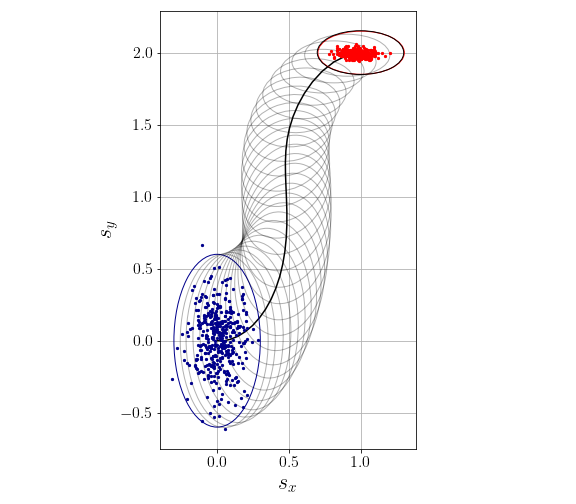 | 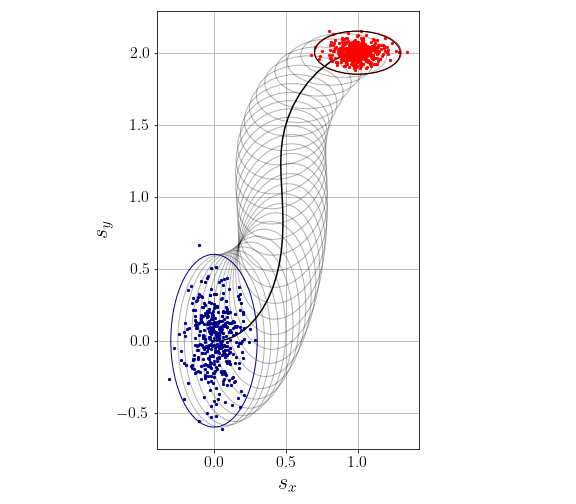 |
Presented at the 74th Annual Meeting of the APS Division of Fluid Dynamics, Phoenix, AZ, 2021.
Presented at the AIAA SciTech 2022 Forum in San Diego, CA.
Presented at the 75th Annual Meeting of the APS Division of Fluid Dynamics, Indianapolis, IN, 2022.

Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.